Optunaの最適化結果をグラフで可視化して保存する
Pythonの最適化ライブラリーOptunaを使ったあとその結果を可視化してグラフに保存したいと思ったのでそのメモ.
必要なライブラリーのインストール
今回必要になるライブラリは Optuna,それと可視化のためのPlotlyそしてKaleidoの3つ.KaleidoはPlotlyのグラフを保存するのに必要みたいで,直接呼び出したりはしない. ではそれぞれpipでインストールしておく
$ pip install optuna $ pip install plotly $ pip install kaleido
Plotlyの簡単な使い方は過去の記事にある. Plotlyで簡単なグラフを描いてみる(Python) - My Memo
Optunaで最適化
次はOptunaで最適化を行う.今回はz=x2+y2+xyが最小になるように x, yを最適化する(最小/最大化させたい関数zを目的関数という).ちなみに,z=x2+y2+xyはx=0, y=0で最小となるので,0に近いx, yが得られれば最適化できたことになる.ちなみにこの式のグラフはこんな感じ.
import optuna import numpy as np import plotly.graph_objects as go
次に最小化(あるいは最大化)する関数を書く.今回はz=x2+y2+xy.
def func(x, y): return x**2+y**2+x*y
次に,最適化したい変数の範囲を設定して目的関数のラッパーを定義する. 最適化したい変数の範囲に関して,今回はx, yともに 0から1の値を取るようにする.
def objective(trial): x = trial.suggest_uniform('x', -1, 1) # xの範囲指定 y = trial.suggest_uniform('y', -1, 1) # yの範囲指定 return func(x, y)
この関数は必ずtrialを引数にとり,最適化したい目的関数を返すようにする.なお範囲を指定するとき,整数のみをとることや,リストの要素から選ぶようにすることも可能
| メソッド | ||
|---|---|---|
| suggest_categorical(name, choices) | choicesというリストの中から選ぶ | x=trial.suggest_categorical('x', ['a', 'b', 'c']) |
| suggest_int(name, low, high[, step, log]) | 整数から選ぶ | x=trial.suggest_categorical('x', 1, 10, 2) 1から10まで2刻み |
のように.
そして,目的関数と変数の範囲を指定したら最適化する.
if __name__ == "__main__": # search optimal x and y study = optuna.create_study(direction='minimize') study.optimize(objective, n_trials=50)
今回は目的関数の値を最小化させたいので,direction='minimize'と書いたが,目的関数を最大化させたい場合はdirection='maximize'とすると良い.なおdirectionを省略した場合自動的にdirection='minimize'になる.study.optimize()では目的関数と試行回数を引数として渡す.これで実行すれば最適化をしてくれる.実行すると標準出力に結果が逐次表示されるが,optunaの標準出力をファイルに保存したい場合は実行時に
$ python optimize.py &> output.txt
とすればファイルに保存できる.&を忘れずに.
結果の可視化
ここまで来るとあとはかんたん.最適化したあとの数値的な結果はstudyが持っているので 数値はそれを出せばよい.以下のコードで標準出力してくれる.
# print result print(study.best_params) # x, yの最適な値 print(study.best_value) # zの最適値 print(study.best_trial) # x, y, zの最適値
次は結果のグラフを出力する. まずは, x,yの値に対するzの値を等高線図で表示する.コードは以下.
# print result # contour plot fig = optuna.visualization.plot_contour(study) fig.write_html('image/contour.html') # save as html file fig.write_image('image/contour.png') # save as png file
optuna.visualization.plot_contour(study)メソッドは Plotlyのグラフインスタンスを返すので,保存するには上のようにする. Plotlyのグラフインスタンスの扱い方の詳細は Plotlyで簡単なグラフを描いてみる(Python) - My Memo
するとこのようなグラフが保存される.

# Hyperparameter importances fig = optuna.visualization.plot_param_importances(study) fig.write_html('image/param_importance.html') # save as html file fig.write_image('image/param_importance.png') # save as png file
グラフは

# Empirical Distribution Function Plot fig = optuna.visualization.plot_edf(study) fig.write_html('image/edf.html') # save as html file fig.write_image('image/edf.png') # save as png file # Optimization History Plot fig = optuna.visualization.plot_optimization_history(study) fig.write_html('image/optimization_history.html') # save as html file fig.write_image('image/optimization_history.png') # save as png file # parallel coordinate plot fig = optuna.visualization.plot_parallel_coordinate(study) fig.write_html('image/parallel_coordinate.html') # save as html file fig.write_image('image/parallel_coordinate.png') # save as png file # slice fig = optuna.visualization.plot_slice(study) fig.write_html('image/slice.html') # save as html file fig.write_image('image/slice.png') # save as png file
それぞれグラフは




今回のコード全体
今回のコードの全体を貼っておく.なお,目的関数の三次元グラフ描画する部分も付け足しておいた.
import optuna import numpy as np import plotly.graph_objects as go def func(x, y): return x**2+y**2+x*y def objective(trial): x = trial.suggest_uniform('x', -1, 1) y = trial.suggest_uniform('y', -1, 1) return func(x, y) if __name__ == "__main__": # plot func(x, y) by plotly x = np.linspace(-1, 1, 100) y = np.linspace(-1, 1, 100) xx, yy = np.meshgrid(x, y) z = func(xx, yy) fig = go.Figure() fig.add_trace(go.Surface(z=z, x=x, y=y)) fig.write_html('objective.html') # search optimal x and y study = optuna.create_study(direction='minimize') study.optimize(objective, n_trials=50) # print result print(study.best_params) print(study.best_value) print(study.best_trial) # visualize # contour plot fig = optuna.visualization.plot_contour(study) fig.write_html('image/contour.html') # save as html file fig.write_image('image/contour.png') # save as png file # Empirical Distribution Function Plot fig = optuna.visualization.plot_edf(study) fig.write_html('image/edf.html') # save as html file fig.write_image('image/edf.png') # save as png file # Optimization History Plot fig = optuna.visualization.plot_optimization_history(study) fig.write_html('image/optimization_history.html') # save as html file fig.write_image('image/optimization_history.png') # save as png file # parallel coordinate plot fig = optuna.visualization.plot_parallel_coordinate(study) fig.write_html('image/parallel_coordinate.html') # save as html file fig.write_image('image/parallel_coordinate.png') # save as png file # Hyperparameter importances fig = optuna.visualization.plot_param_importances(study) fig.write_html('image/param_importance.html') # save as html file fig.write_image('image/param_importance.png') # save as png file # slice fig = optuna.visualization.plot_slice(study) fig.write_html('image/slice.html') # save as html file fig.write_image('image/slice.png') # save as png file
線形計画問題を単体法(シンプレックス法)によって解くコードを Pythonで実装してみた
現在執筆中..
線形計画問題
今回解く線形計画問題は不等式標準形とする.なお,任意の線形計画問題は不等式標準形に変換可能なので,このコードを適用させるには不等式標準形に変換(→おまけ)してから適用させる必要がある.ただし,任意の線形計画問題は不等式標準形に変形できるという事実があるので結構使えると思う.
不等式標準形の線形計画問題
また,このような線形計画問題を以下のように表すことにする.
最小化:
条件:
具体的な例としては下の3次元空間での線形計画問題を取り扱う.
例1
最小化:
条件:
この場合
,
,
,
とすれば,上の
最小化:
条件:
という形で表す事ができるとわかる.とにかく条件を満たす で目標関数を最小にするものを求めるということを行う.そのような線形計画問題のための解法の1つが単体法(シンプレックス法)である.というわけで最初に単体法の解説を簡単に書いておいて,その後pythonのコードに焼き直す.
単体法
単体法の
単体法の実装
とにかく上のアルゴリズムを Pythonでコーディングすると↓のようになる.
from copy import deepcopy import numpy as np import traceback class Simplex(): def __init__(self, A, b, c): self.A = A self.b = b self.c = c self.m, self.n = A.shape # m: 方程式の数, n: 変数の次元 # 辞書の定義 self.dic = np.zeros((self.m + 1, self.n + 1), dtype='float64') for i in range(self.m): for j in range(self.n): self.dic[i + 1, j + 1] += A[i, j] for j in range(self.n): self.dic[0, j + 1] += c[j] for i in range(self.m): self.dic[i + 1, 0] += -b[i] self.x_n = np.zeros(self.n, dtype='float64') # 非基底変数 self.x_m = np.zeros(self.m, dtype='float64') # 基底変数 self.x_n_index = np.arange(0, self.n, dtype='int64') self.x_m_index = np.arange(self.n, self.m + self.n, dtype='int64') def run(self): # 原点が許容解であるか確認 for j in range(self.n): self.x_n[j] = 0.0 self.x_m = self.update_basis() # 非基底変数が原点のときの基底変数を代入 is_feasible = True for x in self.x_m: is_feasible = is_feasible and (x >= 0.0) if not is_feasible: try: # 原点が非許容である場合エラー出力 raise Exception('The origin is not feasible.') except BaseException: print(traceback.format_exc()) z_sol = self.loop() x_sol = [0 for _ in range(self.n)] x_concat = np.concatenate([self.x_n, self.x_m]) index_concat = np.concatenate([self.x_n_index, self.x_m_index]) for j, x in zip(index_concat, x_concat): if j < self.n: x_sol[j] = x return z_sol, np.array(x_sol) def loop(self): while True: self.show_dic() # 非基底変数の選択 j_pivot = -1 for j, a in enumerate(self.dic[0, 1:]): if a < 0: j_pivot = j + 1 break if j_pivot == -1: # 負である係数が存在しない場合終了 return self.get_cost() # 基底変数の選択 base_candidate = {} for i in range(1, self.m + 1): if self.dic[i, j_pivot] < 0: base_candidate[i] = self.dic[i, 0] \ / abs(self.dic[i, j_pivot]) if len(base_candidate) == 0: # 基底の候補がない場合はこの線形計画問題は非有界 raise Exception('This problem is unbounded.') d_min = min(base_candidate.values()) i_min_list = [kv[0] for kv in base_candidate.items() if kv[1] == d_min] # 基底の候補から添え字の最小となる基底を選択 i_pivot = self.m + self.n index_pivot = self.m + self.n for i_min in i_min_list: if index_pivot >= self.x_m_index[i_min - 1]: i_pivot = i_min index_pivot = self.x_m_index[i_min - 1] # 選択された非基底変数を許容性を保存しつつ最大限まで増加させる self.x_n[j_pivot - 1] = d_min self.x_m[i_pivot - 1] = 0.0 # ピボット演算でdic, x_m, x_n, x_m_index, x_n_indexを更新 self.pivot(i_pivot, j_pivot) def pivot(self, i_pivot, j_pivot): self.x_m[i_pivot - 1], self.x_n[j_pivot - 1] = \ self.x_n[j_pivot - 1], self.x_m[i_pivot - 1] self.x_m_index[i_pivot - 1], self.x_n_index[j_pivot - 1] = \ self.x_n_index[j_pivot - 1], self.x_m_index[i_pivot - 1] dic_prev = deepcopy(self.dic) for i in range(self.m + 1): if i == i_pivot: c = -1.0 / dic_prev[i_pivot, j_pivot] self.dic[i, :] = dic_prev[i, :] * c self.dic[i_pivot, j_pivot] = -c else: c = dic_prev[i, j_pivot] / dic_prev[i_pivot, j_pivot] self.dic[i, :] = dic_prev[i, :] - dic_prev[i_pivot, :] * c self.dic[i, j_pivot] = c def update_basis(self): return np.dot(self.dic[1:, 1:], self.x_n) + self.dic[1:, 0] def get_cost(self): return np.dot(self.dic[0, 1:], self.x_n) + self.dic[0, 0] def show_dic(self): print(' | |', end='') for x in self.x_n_index: print('%10.2f ' % (x), end='') print('') print('-' * (4 + 11 + 11 * self.n)) print('cost|%10.2f|' % (self.dic[0, 0]), end='') for d in self.dic[0, 1:]: print('%10.2f ' % (d), end='') print('') for i in range(1, self.m + 1): print('%4d|%10.2f|' % (self.x_m_index[i - 1], self.dic[i, 0]), end='') for d in self.dic[i, 1:]: print('%10.2f ' % (d), end='') print('') print('') # 実際に実行してみる if __name__ == "__main__": A = np.array([[-2, -2, 1], [-2, 0, -4], [4, -3, 1]], dtype='float64') b = np.array([4, 4, 1], dtype='float64') c = np.array([-2, -1, -1], dtype='float64') print(Simplex(A, b, c).run())
まずはSimplexクラスのコンストラクタの説明から.
def __init__(self, A, b, c): self.A = A self.b = b self.c = c self.m, self.n = A.shape # m: 方程式の数, n: 変数の次元
# 辞書の定義 self.dic = np.zeros((self.m + 1, self.n + 1), dtype='float64') for i in range(self.m): for j in range(self.n): self.dic[i + 1, j + 1] += A[i, j] for j in range(self.n): self.dic[0, j + 1] += c[j] for i in range(self.m): self.dic[i + 1, 0] += -b[i] self.x_n = np.zeros(self.n, dtype='float64') # 非基底変数 self.x_m = np.zeros(self.m, dtype='float64') # 基底変数 self.x_n_index = np.arange(0, self.n, dtype='int64') self.x_m_index = np.arange(self.n, self.m + self.n, dtype='int64')
メソッドrun()にて単体法のアルゴリズムを実行する.
def run(self): # 原点が許容解であるか確認 for j in range(self.n): self.x_n[j] = 0.0 self.x_m = self.update_basis() # 非基底変数が原点のときの基底変数を代入 is_feasible = True for x in self.x_m: is_feasible = is_feasible and (x >= 0.0) if not is_feasible: try: # 原点が非許容である場合エラー出力 raise Exception('The origin is not feasible.') except BaseException: print(traceback.format_exc()) z_sol = self.loop()
def update_basis(self): return np.dot(self.dic[1:, 1:], self.x_n) + self.dic[1:, 0] def get_cost(self): return np.dot(self.dic[0, 1:], self.x_n) + self.dic[0, 0]
def loop(self): while True: self.show_dic() # 非基底変数の選択 j_pivot = -1 for j, a in enumerate(self.dic[0, 1:]): if a < 0: j_pivot = j + 1 break if j_pivot == -1: # 負である係数が存在しない場合終了 return self.get_cost() # 基底変数の選択 base_candidate = {} for i in range(1, self.m + 1): if self.dic[i, j_pivot] < 0: base_candidate[i] = self.dic[i, 0] \ / abs(self.dic[i, j_pivot]) if len(base_candidate) == 0: # 基底の候補がない場合はこの線形計画問題は非有界 raise Exception('This problem is unbounded.') d_min = min(base_candidate.values()) i_min_list = [kv[0] for kv in base_candidate.items() if kv[1] == d_min] # 基底の候補から添え字の最小となる基底を選択 i_pivot = self.m + self.n index_pivot = self.m + self.n for i_min in i_min_list: if index_pivot >= self.x_m_index[i_min - 1]: i_pivot = i_min index_pivot = self.x_m_index[i_min - 1] # 選択された非基底変数を許容性を保存しつつ最大限まで増加させる self.x_n[j_pivot - 1] = d_min self.x_m[i_pivot - 1] = 0.0 # ピボット演算でdic, x_m, x_n, x_m_index, x_n_indexを更新 self.pivot(i_pivot, j_pivot)
ピボットの部分はこんな感じ.
def pivot(self, i_pivot, j_pivot): self.x_m[i_pivot - 1], self.x_n[j_pivot - 1] = \ self.x_n[j_pivot - 1], self.x_m[i_pivot - 1] self.x_m_index[i_pivot - 1], self.x_n_index[j_pivot - 1] = \ self.x_n_index[j_pivot - 1], self.x_m_index[i_pivot - 1] dic_prev = deepcopy(self.dic) for i in range(self.m + 1): if i == i_pivot: c = -1.0 / dic_prev[i_pivot, j_pivot] self.dic[i, :] = dic_prev[i, :] * c self.dic[i_pivot, j_pivot] = -c else: c = dic_prev[i, j_pivot] / dic_prev[i_pivot, j_pivot] self.dic[i, :] = dic_prev[i, :] - dic_prev[i_pivot, :] * c self.dic[i, j_pivot] = c
z_sol = self.loop()
x_sol = [0 for _ in range(self.n)]
x_concat = np.concatenate([self.x_n, self.x_m])
index_concat = np.concatenate([self.x_n_index, self.x_m_index])
for j, x in zip(index_concat, x_concat):
if j < self.n:
x_sol[j] = x
return z_sol, np.array(x_sol)
さて,上の例で示した線形計画問題を解いてみる.
例1
最小化:
条件:
if __name__ == "__main__": A = np.array([[-2, 2, 0], [-1, -1, 2], [-1, -1, -1]], dtype='float64') b = np.array([-6, -3, -3], dtype='float64') c = np.array([-1, 2, -1], dtype='float64') print(Simplex(A, b, c).run())
| | 0.00 1.00 2.00
------------------------------------------------
cost| 0.00| -1.00 2.00 -1.00
3| 6.00| -2.00 2.00 0.00
4| 3.00| -1.00 -1.00 2.00
5| 3.00| -1.00 -1.00 -1.00
| | 3.00 1.00 2.00
------------------------------------------------
cost| -3.00| 0.50 1.00 -1.00
0| 3.00| -0.50 1.00 0.00
4| 0.00| 0.50 -2.00 2.00
5| 0.00| 0.50 -2.00 -1.00
| | 3.00 1.00 5.00
------------------------------------------------
cost| -3.00| 0.00 3.00 1.00
0| 3.00| -0.50 1.00 -0.00
4| 0.00| 1.50 -6.00 -2.00
2| 0.00| 0.50 -2.00 -1.00
(-3.0, array([3., 0., 0.]))こんな感じ.辞書の更新がされて最後に目的関数-3.0, 最適解ということでいい感じに計算できてましたということでおしまい.
おまけ
サンプリング定理の証明
サンプリング定理の証明
最近勉強しているとサンプリング定理(標本化定理)が出てきて,それについての証明をしてみたので未来の自分に向けてメモを残しておこうと思う.
今回はこういうふうに考える.ある信号波に対して搬送波として矩形波
を用いて変調を行い,PAM波
を得る(パルス振幅変調:PAM).このPAM波を復調したときに信号波を完全に復元できるためには搬送波である矩形波の周波数は,
(:矩形波の周波数.
:信号波に含まれる周波数の最大値)
を満たす必要がある.これを示してみる.

証明
まず,搬送波として振幅,周期
,一周期内での非ゼロの時間
である矩形波
を考える.

この矩形波をフーリエ級数展開すると,以下のようになる(矩形波のフーリエ級数展開のやり方はこのページの後ろを参照).
さらに,信号波をフーリエ展開すると以下のようになるとする.
このとき信号波に含まれる周波数の最大値は,となる.
そうするとPAM波が得られ,
となる.ここで,式を見やすくするために と置いて,式の第二項を展開すると,
さて,ここで上式の第一項に関しては,Bの値が既知なので第二項さえ取り除くことができれば,PAM波をもとの信号波に完全に復元できたと言える.ではどのような手法で第二項を取り除くか?またその手法を用いることのできる条件は何か?
ここで用いるのが低域通過フィルタである.これは,合成波のなかで,ある周波数以上の周波数成分を取り除く電子回路である(このページの後ろに簡単な説明を載せときます).ではここではいくつ以上の周波数成分を取り除けばよいかというと,もちろんとなる成分を取り除けば良い.なぜなら,
以下の周波数成分を取り除くと上式の第一項の成分も取り除かれて,PAM波から信号波を完全に取り除くことができなくなるからである.更にいうと,
を取り除く低域通過フィルタを作用させたときに第二項が完全に除去される必要がある.つまり,第二項の成分のうち,周波成の最小値が
を満たしていれば良い.では,上式第二項の最小周波数はいくつなのか.整数
の範囲は
で,
は
なので,最小周波数は
に
を代入した
となる.したがって,低域通過フィルタを用いてPAM波から信号波を完全に復調できる条件は,低域通過フィルタ
で上式第二項の最小周波数成分
を除去できることであり,数式にすると,
つまり,搬送波として用いる矩形周波数は,信号波に含まれる周波数の最大値の二倍より大きくなくてはならない.また,を満たすような周波数
をナイキスト周波数とよんだりする.
Plotlyで線グラフをたくさん描く
Plotlyとは?
Pythonのグラフ描画ライブラリーで描画したグラフの拡大縮小,軸のスケールの変更などなどができる.
Plotlyのグラフ描画モジュールにはexpressとgraph_objectsがあるらしいが,基本はgraph_objectsでexpressモジュールはサクッとグラフを書くためのモジュールで内部ではgraph_objectsの関数を呼んでいるらしい.(公式ドキュメントPlotly Express | Python | Plotlyの雑和訳)
今回はgraph_objectsでいい感じのグラフを色々書いてみる
expressでの描写はこちら→
ibetoge.hatenablog.com
線グラフ
基本的なグラフを描写してみる.とりあえず使うモジュールをインポートする.
import numpy as np import plotly.graph_objects as go
# データを用意 t = np.linspace(0, 2*np.pi, 10) sint = np.sin(4*t) ex = np.exp(t/np.pi) # グラフのインスタンス作成 fig = go.Figure(data=[ go.Scatter(x=t, y=sint, name=r'$\sin t$'), go.Scatter(x=t, y=ex, name=r'$e^t$') ]) # 動かせるグラフをブラウザーで表示 fig.show()
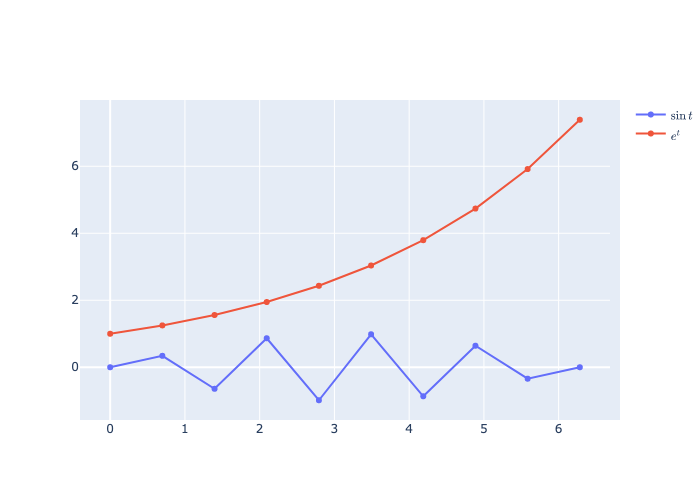
あとは,軸に名前をつけるのと,作成したグラフのインスタンスに新しいグラフを追加してみたい.
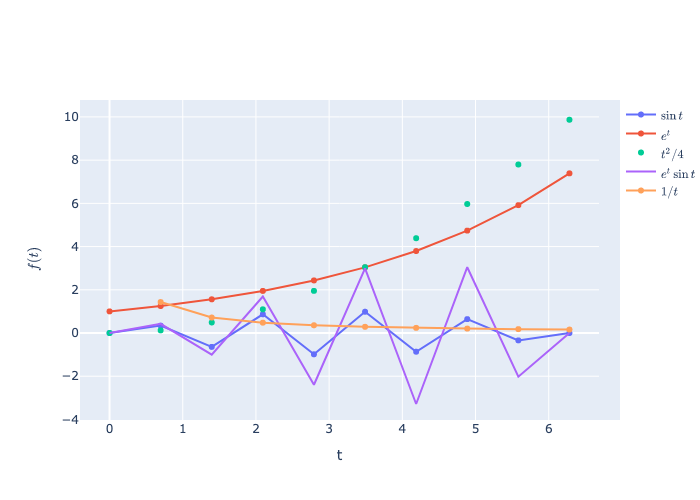
# グラフ追加 fig.add_trace(go.Scatter(x=t, y=t**2/4, name=r'$t^2/4$', mode='markers')) # ドットのみ fig.add_trace(go.Scatter(x=t, y=sint*ex, name=r'$e^t\sin t$', mode='lines')) # 線のみ fig.add_trace(go.Scatter(x=t, y=1/t, name=r'$1/t$', mode='lines+markers')) # ドットと線 # 軸の名前を追加 fig.update_xaxes(title="t") fig.update_yaxes(title=r"$f(t)$")
# 空のインスタンス作成 fig = go.Figure() # グラフ追加 fig.add_trace(go.Scatter(x=t, y=t**2/4, name=r'$t^2/4$')) fig.add_trace(go.Scatter(x=t, y=sint*ex, name=r'$e^t\sin t$')) fig.add_trace(go.Scatter(x=t, y=1/t, name=r'$1/t$' )) fig.show()
Plotlyのグラフをファイルに保存する
fig.show()
を用いると,実行した際に動かせるグラフがブラウザーに表示されるが,グラフをhtmlファイルとして保存したい場合は,
#htmlで保存 fig.write_html("figure.html")
でOK.画像ファイルとして保存するには,kaleidoパッケージが必要なので,次のどちらかのコマンドを叩いてkaleidoをインストールする.(kaleidoの代わりにorcaパッケージでも良いらしいが非推奨)
pipの場合
pip install -U kaleido
anacondaの場合
conda install -c conda-forge python-kaleido
kaleidoをインストールしたら,
#pngで保存 fig.write_image("figure.png") #jpegで保存 fig.write_image("figure.jpeg")
と書けばすれば良し.こうすれば保存したhtmlファイルをブラウザで開けばいつでも動かせるグラフが見られる.もちろん画像ファイルとして保存した場合は動かせない.
棒グラフとは円グラフとかも書こうと思ったけど疲れたからここまで
ソースコード
いろいろな線グラフ
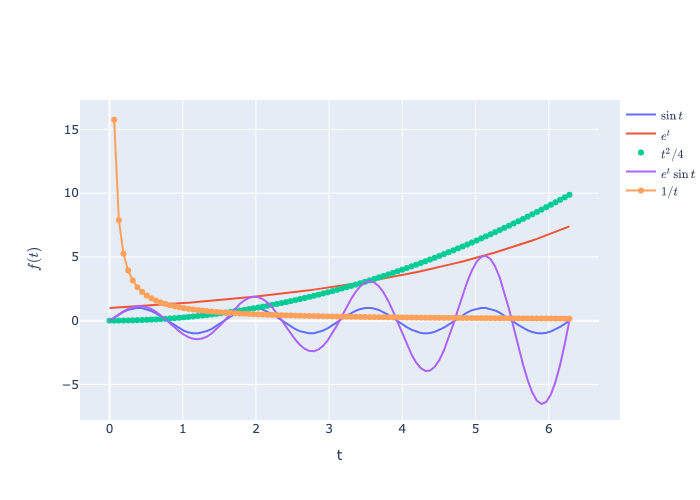
import numpy as np import plotly.graph_objects as go # データを用意 t = np.linspace(0, 2*np.pi, 100) sint = np.sin(4*t) ex = np.exp(t/np.pi) # グラフの空インスタンス作成 fig = go.Figure() # グラフ追加 fig.add_trace(go.Scatter( x=t, y=t**2/4, name=r'$t^2/4$', mode='markers')) # ドットのみ fig.add_trace(go.Scatter(x=t, y=sint*ex, name=r'$e^t\sin t$', mode='lines')) # 線のみ fig.add_trace(go.Scatter(x=t, y=1/t, name=r'$1/t$', mode='lines+markers')) # ドットと線 # 軸の名前を追加 fig.update_xaxes(title="t") fig.update_yaxes(title=r"$f(t)$") # 動かせるグラフをブラウザーで表示 fig.show() #htmlで保存 fig.write_html("figure.html") #pngで保存 fig.write_image("figure.png")
Plotlyで簡単なグラフを描いてみる(Python)
Plotlyとは?
Pythonのグラフ描画ライブラリーで描画したグラフの拡大縮小,軸のスケールの変更などなどができる.
Plotlyのグラフ描画モジュールにはexpressとgraph_objectsがあるらしいが,基本はgraph_objectsでexpressモジュールはサクッとグラフを書くためのモジュールで内部ではgraph_objectsの関数を呼んでいるらしい.(公式ドキュメントPlotly Expressの雑和訳)
今回はexpressでサインカーブを書いてみる.
graph_objectsでの描写はこちら→
ibetoge.hatenablog.com
plotly.expressでとりあえず描く
環境 macOS,python 3.7.6,Plotly 4.14.3
Plotlyがない人はターミナルで下のコマンドを叩いてインストール.
$ pip install plotly
モジュールをインポートする.
import numpy as np import plotly.express as px
t = np.linspace(0, 4*np.pi, 100) sint = np.sin(t)
#グラフのインスタンスを作成 fig = px.line(x=t, y=sint) #グラフをブラウザーで表示 fig.show()
グラフの軸に名前を設定するには,インスタンス作成時に
fig = px.line(x=t, y=sint, labels={'x': r"$t$", 'y': r"$\sin t$"})
とすればOK.ここでr"$\sin t$"とかのr"$$"の部分ですが,Plotlyで文字列にLatex数式を使うときはr"$$"を使用します.
もっとしっかり目盛りなども設定したい人向け→
Plotlyのグラフをファイルに保存する
fig.show()
を用いると,実行した際に動かせるグラフがブラウザーに表示されるが,グラフをhtmlファイルとして保存したい場合は,
#htmlで保存 fig.write_html("figure.html")
でOK.画像ファイルとして保存するには,kaleidoパッケージが必要なので,次のどちらかのコマンドを叩いてkaleidoをインストールする.(kaleidoの代わりにorcaパッケージでも良いらしいが非推奨)
pipの場合
$ pip install -U kaleido
anacondaの場合
$ conda install -c conda-forge python-kaleido
kaleidoをインストールしたら,
#pngで保存 fig.write_image("figure.png") #jpegで保存 fig.write_image("figure.jpeg")
と書けばすれば良し.こうすれば保存したhtmlファイルをブラウザで開けばいつでも動かせるグラフが見られる.もちろん画像ファイルとして保存した場合は動かせない.
最後にソースコード
import plotly.express as px import numpy as np # 横軸は0<t<4pi,グラフはsin(t) t = np.linspace(0, 4*np.pi, 100) sint = np.sin(t) # グラフのインスタンス作成(軸ラベル付き) fig = px.line(x=t, y=sint, labels={'x': r"$t$", 'y': r"$\sin t$"}) fig.update_xaxes(title="t") fig.update_yaxes(title=r"$\sin t$") # グラフをブラウザーに表示 fig.show() # htmlで保存 fig.write_html("figure.html")
極座標形式の2次元データをMatplotlibで描写する


数値解析を極座標で行った後,2次元の極座標形式データを描写したい時がありました.
例えば,
のような座標でのデータを描写したい時があります.つまり
double r[imax]; double theta[jmax]; double T[jmax][imax];
のような配列データを格納したcsvファイルやらが手元にあります.それらをpythonを用いてmatplotlibで描写しましょう.
(方向にそれぞれ
分割してるような空間を配列r,thetaによって表現していて,
そのグリッド点で物理量T[jmax][imax]を定義しています.)
上の配列はそれぞれr.csv,theta.csv,T.csvに入っていることにしておきます.
今回は
として,Tを描写します.
流れとしては,
という感じです.
まずは必要なモジュールたちをインポートします.
from mpl_toolkits.mplot3d import Axes3D import matplotlib.pyplot as plt import numpy as np from scipy import interpolate
scipyはスプライン補完に使い,mpl_toolkits.mplot3dと matplotlib.pyplotは描写,numpyは色々なことに使います.
次にnumpyでcsvファイルを読み込んで配列に格納しましょう.
r = np.loadtxt("r.csv", delimiter=',') theta = np.loadtxt("theta.csv", delimiter=',') T_polar = np.loadtxt("T.csv", delimiter=',')
描写したいx-y平面とx-y平面でのTを定義します.今回は配列r,thetaで表せる部分をすべて含めて,グリッド幅は配列rと同じにしておきます.
size_r = r.shape[0] x = np.linspace(-r[-1], r[-1], 2*size_r) y = np.linspace(-r[-1], r[-1], 2*size_r) T_cartesian = np.empty((2*size_r, 2*size_r))
スプライン補完でx-y平面でのTを計算
spl_T = interpolate.interp2d(theta, r, T_polar, kind='cubic') for ix in range(0, 2*size_r): for iy in range(0, 2*size_r): r_tmp = (x[ix]**2+y[iy]**2)**0.5 costh = x[ix]/(x[ix]**2+y[iy]**2)**0.5 th_tmp = np.arccos(costh) T_cartesian[ix, iy] = spl_T(th_tmp, r_tmp)
最後に描写
x, y = np.meshgrid(x, y, indexing='ij') fig = plt.figure() ax = fig.add_subplot(1, 1, 1) ax.contourf(x, y, T_cartesian) plt.xlabel('x') plt.ylabel('y') plt.show()
これで完成.
割と一般化できるやり方なので,これで任意の座標系から任意の座標系へ変換して描写できるようになります.
ちなみに今回はカラーマップの等値線図を書きましたが
ax = fig.add_subplot(1, 1, 1) ax.contourf(x, y, T_cartesian)
の部分を変えるといろいろな図にできます.
グラフの種類
等値線図
ax = fig.add_subplot(1, 1, 1) ax.contour(x, y, T_cartesian)

3次元ワイヤーフレーム
ax = fig.add_subplot(1, 1, 1, projection="3d") ax.plot_wireframe(x, y, T_cartesian)

3次元曲面
ax = fig.add_subplot(1, 1, 1, projection="3d") ax.plot_surface(x, y, T_cartesian)

コード
最後にcsv作るように書いたコードとプロットするのに使ったコードを載せときます.
CSV作るよう
#include <cmath> #include <fstream> #include <iostream> using namespace std; int main() { int imax = 200; int jmax = 128; double r[imax], theta[jmax], T[jmax][imax]; double pi; pi = acos(-1.0); for (int i = 0; i < imax; i++) { r[i] = (i + 0.50) / imax; } for (int j = 0; j < jmax; j++) { theta[j] = (j + 0.50) / jmax * 2.0 * pi; } for (int i = 0; i < imax; i++) { for (int j = 0; j < jmax; j++) { T[j][i] = exp(-1.0 * pow(r[i], 2)); } } ofstream ofsr("r.csv"); for (int i = 0; i < imax - 1; i++) { ofsr << r[i] << ","; } ofsr << r[imax - 1] << endl; ofstream ofst("theta.csv"); for (int j = 0; j < jmax - 1; j++) { ofst << theta[j] << ","; } ofst << theta[jmax - 1] << endl; ofstream ofsv("T.csv"); for (int i = 0; i < imax; i++) { for (int j = 0; j < jmax; j++) { if (j == jmax - 1) { ofsv << T[j][i] << endl; } else { ofsv << T[j][i] << ","; } } } }
プロットする
from mpl_toolkits.mplot3d import Axes3D import matplotlib.pyplot as plt import numpy as np from scipy import interpolate # csvを読み込む r = np.loadtxt("r.csv", delimiter=',') theta = np.loadtxt("theta.csv", delimiter=',') T_polar = np.loadtxt("T.csv", delimiter=',') # x-y平面を定義してスプライン補完 size_r = r.shape[0] x = np.linspace(-r[-1], r[-1], 2*size_r) y = np.linspace(-r[-1], r[-1], 2*size_r) T_cartesian = np.empty((2*size_r, 2*size_r)) spl_T = interpolate.interp2d(theta, r, T_polar, kind='cubic') for ix in range(0, 2*size_r): for iy in range(0, 2*size_r): r_tmp = (x[ix]**2+y[iy]**2)**0.5 costh = x[ix]/(x[ix]**2+y[iy]**2)**0.5 th_tmp = np.arccos(costh) T_cartesian[ix, iy] = spl_T(th_tmp, r_tmp) # matplotlibで描写する x, y = np.meshgrid(x, y, indexing='ij') fig = plt.figure() ax = fig.add_subplot(1, 1, 1) ax.contourf(x, y, T_cartesian) plt.xlabel('x') plt.ylabel('y') plt.savefig('cartesian.png') # 極座標での描写 theta, r = np.meshgrid(theta, r, indexing='ij') fig = plt.figure() ax = fig.add_subplot(1, 1, 1) ax.contourf(theta, r, T_polar) plt.xlabel(r'$\theta$') plt.ylabel('r') plt.savefig('polar.png')